LA FUNAMBULE VIRTUELLE
Michel Bret, Professeur en A.T.I. Université Paris 8
Marie-Hélène Tramus, Maitre de conférence en A.T.I. Université Paris 8
1 Description
Cette installation propose au spectateur de devenir, pour quelques instants, un
funambule. Avec le balancier qu´il tient entre ses mains il interagit avec un
autre funambule, virtuel celui-ci, dont l´image est projetée sur un écran de 2
mètres de haut. Le face à face entre les deux "acteurs" s´élabore
autour d´un jeu d´équilibre-déséquilibre.
Un capteur de mouvement, fixé
au balancier, transmet à l´ordinateur des informations de position et
d´orientation interpretées en temps réel comme des forces agissant sur l´acteur
dynamique de synthèse contrôlé par des réseaux neuronaux. Ainsi celui-là
développe des stratégies gestuelles autonomes acquises lors d´apprentissages.
Plus qu´une simple boucle
réotractive, ce système est un être artificiel, certes très élémentaire, mais
montrant certaines propriétés du vivant: Par exemple la notion de généralisation,
propre aux réseaux neuronaux, lui confère une richesse potentiellement
illimitée de réactions non apprises et cependant adaptées. Son intelligence
apparait comme une propriété émergente des interactions entre ses
élements (des neurones artificiels), les informations qu´il capte de son
environnement, et sa structure (simulation d´un corps humain muni de certains
comportements).
Équipement nécessaire
Un ordinateur PC, Pentium 1.5 GHz, 512 Mo de mémoire, disque de 6 Go
Système Windows 2000
Le logiciel anyflo
Un capteur
"Polhemus" ISOTRACK II, ou un capteur "Itrax"
Un vidéo projecteur de 1000
lumens
Un écran d´environ 2 mètres
par 2 mètres
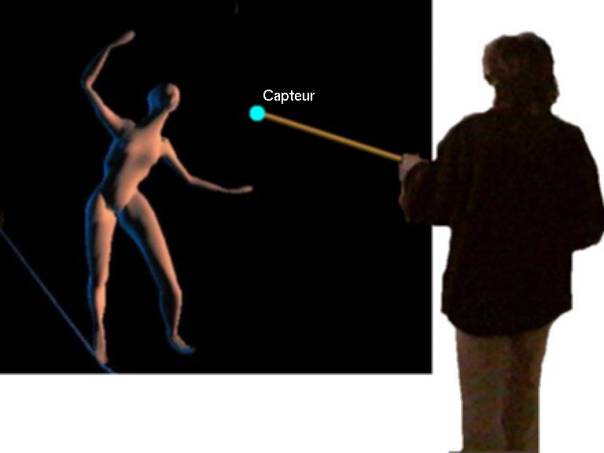
Spectateur face à une vidéoprojection du funambule virtuel avec lequel il
interagit au moyen d´un capteur de position.
2 Interactivité et modèles comportementaux
Les modèles fonctionnels produisent des installations entièrement
déterministes, et ne proposent, au mieux, qu´un ensemble de combinaisons
possibles (art permutationnel) à partir d´un vocabulaire limité, le rôle
du spectateur se limitant alors à parcourir un labyrinthe (stratégies du choix
mises en oeuvre par la visite des sites sur Internet ou l´utilisation d´un CDROM).
Un modèle comportemental qui
produit un système intégrant le spectateur généralise la notion de participation
définie par Popper [Popper 80]: Il ne s´agit plus de réactions programmées aux
sollicitations d´un humain, mais de la réorganisation, ni prévisible ni stable,
d´un système complexe, hybridation de machine et de nature, duquel émerge un
comportement global concernant aussi bien sa composante artificielle que sa
composante humaine.
3 Description technique
C´est le cas du funambule (Bret Tramus 2000) qui met en scène un
funambule virtuel ainsi structuré:
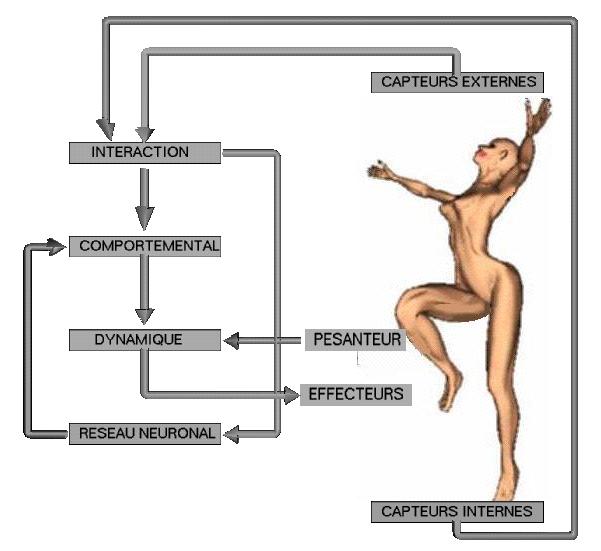
Structure du funambule.
1) Un module dynamique
produisant des mouvements crédibles d´un corps féminin en équilibre sur un fil
et soumi à différentes forces:
Un champ de pesanteur.
Une force de réaction du fil
sur le pied porteur.
Des forces externes produites
par le module d´interaction.
En l´absence de contrôle
propre, le corps tend à s´écrouler et à basculer.
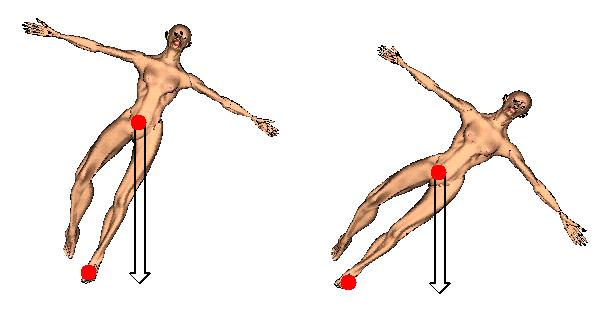
Corps soumis à des forces externes.
2) Un module comportemental
lui-même structuré sur deux niveaux:
Des forces réflexes de
rééquilibrage.
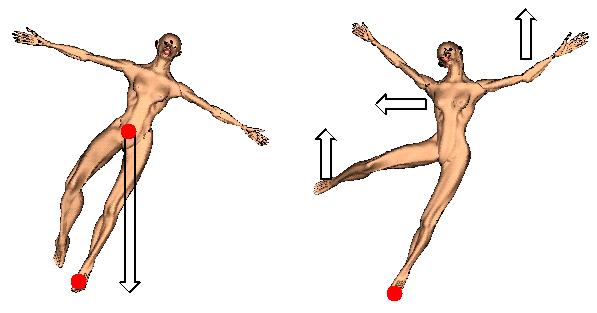
Comportement réflexe de rééquilibrage.
Production de mouvements volontaires
sur ordre du module connexionniste. Il s´agit en fait des sorties d´un réseau
neuronal interprétées comme des projets (pratriquement des listes de
couples appliqués aux articulations du corps) qui sont ensuite exécutés (c´est
à dire passés au module dynamique), mais ils peuvent être interrompus à tout
instant par un événement extérieur.
Comportement appris.
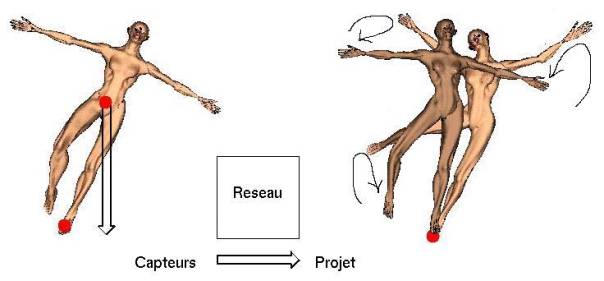
3) Un module interactif
interprétant les positions d´un capteur (polhemus), manipulé par le spectateur,
comme des forces externes exercées sur le corps.
4) Un module connexionniste
implémenté sous la forme d´un réseau neuronal dont les entrées sont connectées
à des capteurs angulaires et de pression donnant les positions relatives des
membres et du pied en contact avec le fil, et dont les sorties sont connectées
au module comportemental. Une ou plusieurs couches intermédiaires de neurones
complexifient le réseau.
Dans un premier temps les
poids du réseau sont initialisés aléatoirement, puis il subit un apprentissage
supervisé aucours duquel un certain nombre de couples (Ei,Si)
lui sont présentés, pour chaque entrée Ei il calcule la sortie Ci,
la différence Ci-Si entre la sortie calculée et la sortie
souhaitée est utilisée comme erreur pour corriger les poids du réseau
(par la méthode de la rétropropagation) (voir le connexionnisme en
image de synthèse 5-2). Lorsque toutes les erreurs sont inférieures à un
seuil donné, la matrice des poids est sauvée.
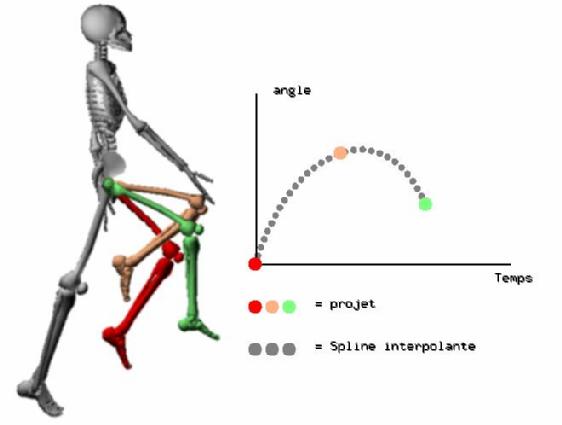
Transformation d´une configuration d´entrées en projet.
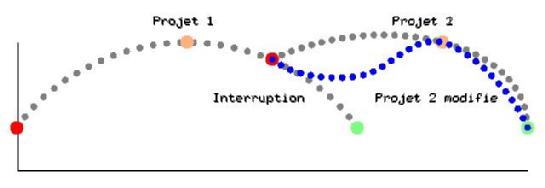
Projet tangent a un projet interrompu.
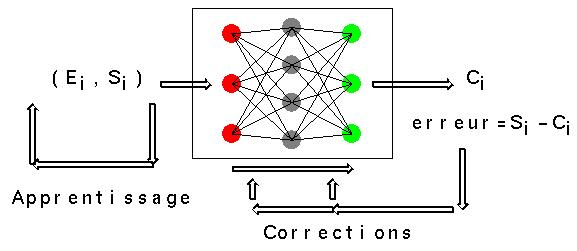
Apprentissage supervisé par l´algorithme de la rétropropagation de l´erreur.
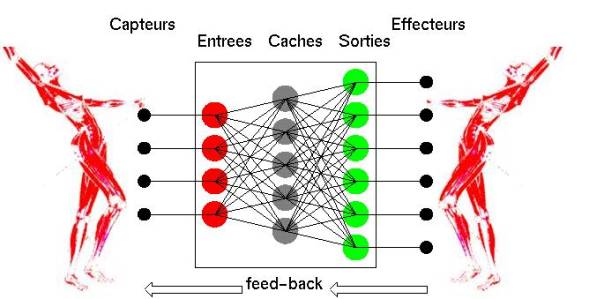
La boucle de rétroaction perception <-> action.
Dans un deuxième temps
l´interaction est lancée en temps réel, le module connexionniste utilisant la
matrice précalculée.
4 Projets futurs
Dans une version future, les deux processus (apprentissage et utilisation de la
matrice) seront lancés en parallèle, le funambule apprenant, en temps réel, les
réactions du spectateur. Il s´ensuivra une interaction plus évoluée dans
laquelle le spectateur pourra constater, contrôler et tenter de modifier, ses
propres actions sur le comportement du funambule virtuel.
Nous comptons aussi confier ce
dispositif à des danseurs de corde professionnels afin, non seulement qu´ils
nous apportent leur compétence en terme de gestuelles, mais encore qu´ils
fassent évoluer cette installation au sein d´un spectacle de cirque.
Nous projetons de généraliser
cette interactivité intelligente, mais singulière (puisque ayant lieu entre un
spectateur réel et un acteur de synthèse), en une interactivité plurielle
faisant dialoguer un ensemble de danseurs humains avec une population de
danseurs artificiels. Des interactions entre ces deux systèmes chorégraphiques,
l´un réel et l´autre virtuel, nous attendons l´émergence de nouvelles pratiques
de la danse et, plus généralement, de nouvelles pratiques de l´art des
spectacles vivants, comme le théatre, le cirque ou le concert.